PIONEER VINE TOMATO
How Polybot wants to make agriculture more sustainable with its robot





Many people share a love of good food – tasty, sustainable and in good company. However, very few are committed to the mission of also producing food in the future in a sensible, ecologically scalable, resilient and sustainable way. Yet this is what happened to the founders of Polybot when they were looking for a new challenge a few years ago. The spark came from Wieland Brendel, group leader at the ELLIS Institute in Tübingen, who suggested tackling complex problems in agriculture with the help of robots: an exciting idea that initially captivated Claudio Michaelis, who turned down a big tech job offer and soon began captivating his colleagues.
This is because modern agriculture is primarily based on monocultures, which in turn rely on a largely mechanical approach on vast areas. This is incredibly efficient, especially for the immense number of people who have to subsist on it – and therefore by no means bad
per se. Monocultures are increasingly reaching their limits,
explains Martin Kiefel, who has a doctorate in machine learning and is an expert in robotics. For example, they are increasingly suffering from extreme weather conditions such as droughts or storms. Rows of trees in between, on the other hand, would retain moisture for longer or protect crops. Biodiversity is also suffering because many animals such as insects, wild hamsters and birds no longer find the diverse habitats they need
.
That’s why Martin Kiefel, Maike Kaufman, Claudio Michaelis, Sebastian Blaes and Elias Atahi have jointly founded Polybot to maintain the existing efficiency while enabling greater resilience. Polybot is by no means a think tank that wants to tell farmers how they should work. We can’t do that because we are not agricultural experts. But our aim is to develop robotic solutions together with farmers in order to automate today's manual tasks economically in the future
.

GREAT INTEREST FROM THE GREENHOUSE
To this end, the Polybot team is in talks with greenhouse growers who are hooked on this idea, which they have been awaiting for a long time,
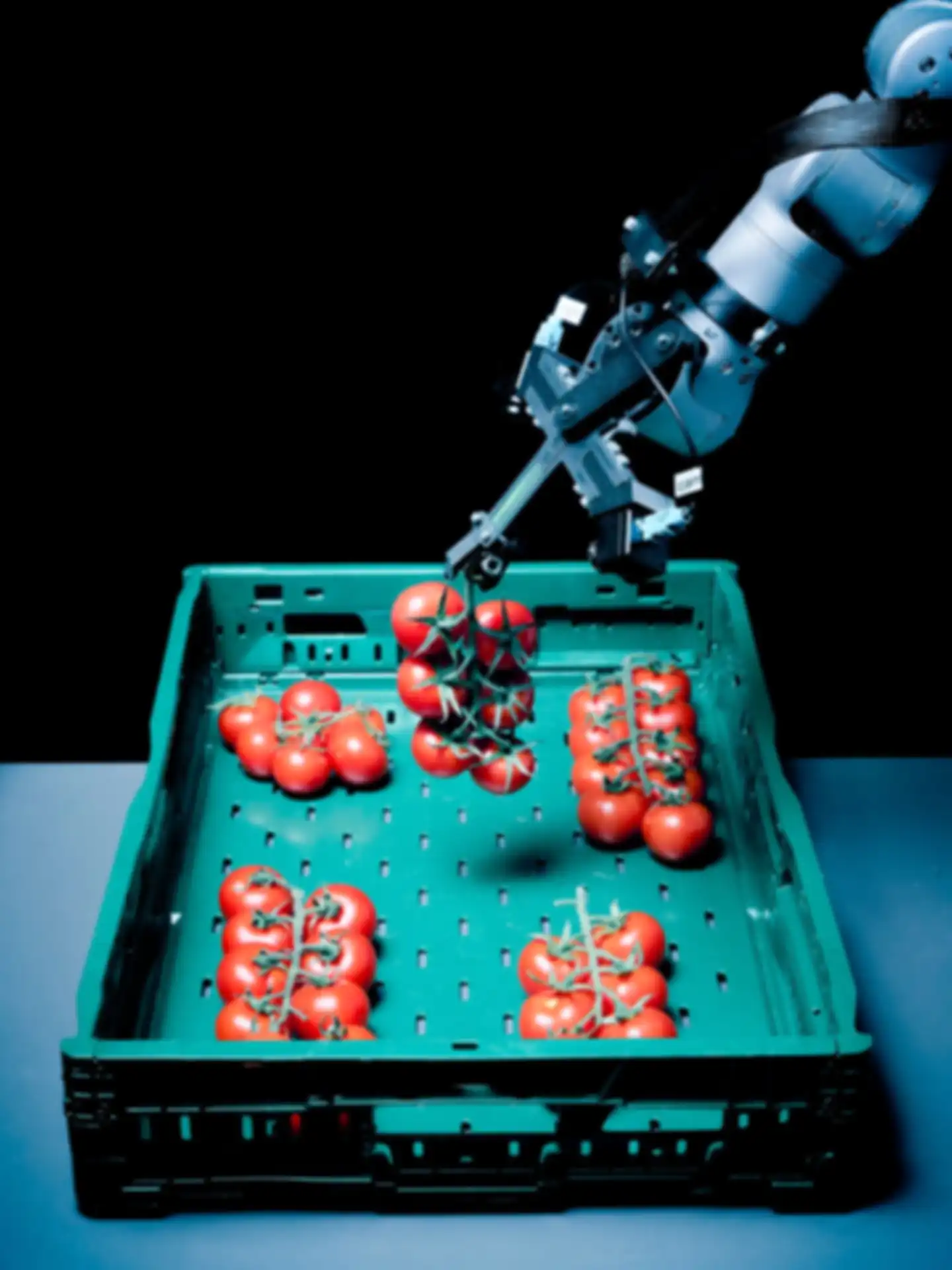
says physicist Maike Kaufman, who previously worked in consulting for some time. Of the four most common greenhouse crops grown in Central Europe – cucumber, bell pepper, tomato and strawberry – Polybot is starting with the vine tomato, which not only accounts for the largest share of greenhouse crops, but also places particularly diverse demands on automation: In addition to harvesting, tomatoes also have to be de-leafed, wound and tied up. This allows us to show what our technology can do,
says Maike Kaufman.
Polybot prototypes are currently moving on a trolley via rail systems, which are usually available as infrastructure, through several greenhouses in Germany, while the team is working on fine-tuning the learning movements and integrating an autonomous trolley to significantly increase the efficiency of its harvesting robots once again. Currently, the machines are already as fast as humans; the aim is to achieve one and a half times the speed. The new technology is not expected to lead to the elimination of jobs but, rather, address the problem of dwindling and reliable farm labor by utilizing robotic harvesting support.
From the foundation to boot camp, circuit training, networking and so many helping hands and concentrated expertise. Without SPRIND, we wouldn’t be at this point now.
CONSTANT REPETITION OF MOVEMENT
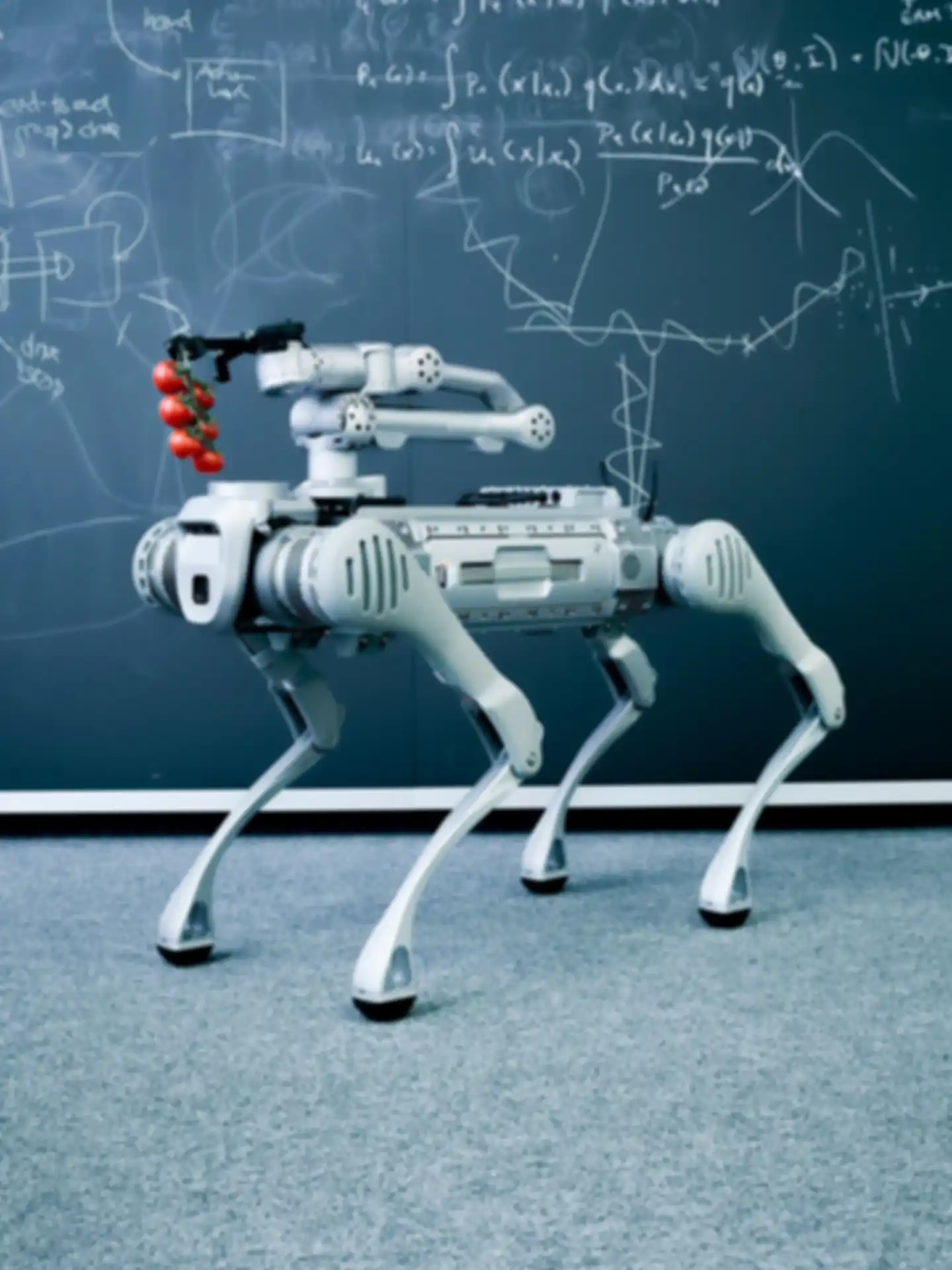
What is particularly fascinating is how the robot learns: We only show it the movement that is being performed and never describe the tomato specifically or how it should reach for it. It understands this by the fact that we show this process over and over again,
explains Martin Kiefel. Over time, the robot also recognizes, for example, that it is always shown red tomatoes, so they seem to be important
.
At the beginning of 2025, Martin Kiefel, Maike Kaufman and Co. submitted their project proposal to the Federal Agency for Breakthrough Innovation SPRIND and started shortly afterwards with a validation order. This went so well that the subsequent start-up grant of almost one million euros from SPRIND helped to found Polybot in November of the same year.
And how does SPRIND currently provide support? The question is rather how SPRIND is not helping us,
emphasizes Maike Kaufman. From the foundation to boot camp, circuit training, networking and so many helping hands and concentrated expertise. Without SPRIND, we wouldn’t be at this point now.
Nevertheless, the team would like to stand on its own two feet as soon as possible: We have a great solution to an important problem and would like to use it to bring private sector support on board in a financing round this year.
The plan is to carry out a fully integrated pilot operation in summer 2026 and deliver the first systems in early 2027. Polybot continues to maintain close ties with the ELLIS Institute Tübingen and the scientists based there; useful synergies from the interlinking of research and practice are utilized here.
And how does SPRIND currently provide support? The question is rather how SPRIND is not helping us,
emphasizes Maike Kaufman. From the foundation to boot camp, circuit training, networking and so many helping hands and concentrated expertise. Without SPRIND, we wouldn’t be at this point now.
Nevertheless, the team would like to stand on its own two feet as soon as possible: We have a great solution to an important problem and would like to use it to bring private sector support on board in a financing round this year.
The plan is to carry out a fully integrated pilot operation in summer 2026 and deliver the first systems in early 2027. Polybot continues to maintain close ties with the ELLIS Institute Tübingen and the scientists based there; useful synergies from the interlinking of research and practice are utilized here.


HARVESTING ROBOT ENABLES SMALLER-SCALE CULTIVATION FOR MORE BIODIVERSITY
The tomato is to be followed by the other products from the greenhouse. Then it’s off to the tree, the bush and the field – wherever fruit or vegetables such as cabbage are to be harvested and sold as a whole, i.e. away from jam, etc., the robot can provide particularly useful support for manual work. A major advantage is that it enables smaller-scale cultivation because the robot, unlike harvesting machines, can easily vary the manual work. In the best case scenario, this provides new areas for flower strips, hedges and rows of trees, and thus more diverse habitats and protective elements in the fields.
The breakthrough innovation really lies in the technology to automate these fine manipulative activities, to use them in agriculture and thus to initiate the major change, a real system change, that we need,
states Martin Kiefel, for biodiversity, high-quality food and the safeguarding of local cultivation, which local agriculture can continue to afford
– and also for the enjoyment of delicious, good food.
YouTuber Jacob Beautemps from Breaking Lab meets Polybot